2024 Team
Report: ROS2 Recording System and Corrupted Database Recovery
Introduction
The ROS2 recording system (via rosbag2) is designed to capture and store messages exchanged between various nodes in a ROS2 environment. It is used for purposes such as logging sensor data, debugging, or replaying data during development. The format is versatile, allowing different storage backends, and in this case, the database uses SQLite3, which is efficient for handling large datasets.
Location of Recorded ROS Bags
All of the recorded ros bags are located on the following path:
~/find-my-kitten/ros2_ws/src/vision_package/rosbag/
on the machine baseboard@82.130.11.125.
ROS2 Interaction with the Recording System
-
Recording Data:
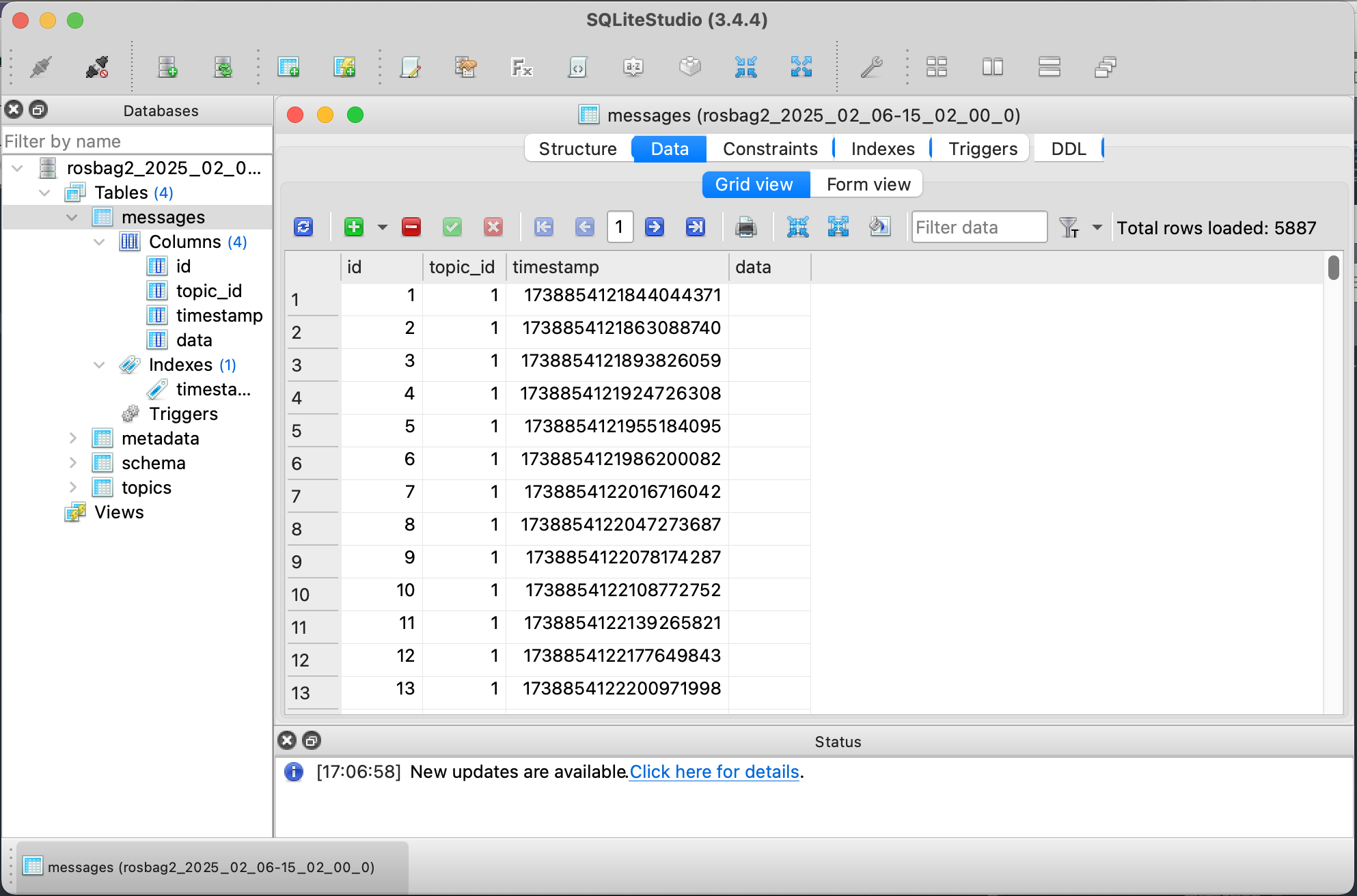
The database file “rosbag2_2025_02_06-15_02_00_0.db3” holds sensor data in the form of images captured from the/image_topic. Therosbag2system records messages of typesensor_msgs/msg/Image, writing them to the SQLite3 database. This recording spans 179.79 seconds, from 17:02:01 to 17:05:01, with a total of 5,887 messages.Bag File Information (as generated by the command
ros2 bag info .):Files: rosbag2_2025_02_06-15_02_00_0.db3 Bag size: 34.1 GiB Storage id: sqlite3 Duration: 179.789623028s Start: Feb 6 2025 17:02:01.844044371 (1738854121.844044371) End: Feb 6 2025 17:05:01.633667399 (1738854301.633667399) Messages: 5887 Topic information: Topic: /image_topic | Type: sensor_msgs/msg/Image | Count: 5887 | Serialization Format: cdr - Metadata Information:
The associated metadata.yaml provides key details:- Message Count: 5,887 messages recorded for the
/image_topic. - Serialization Format: CDR (Common Data Representation), which is a compact binary format used for efficient storage.
- Quality of Service (QoS): Profiles such as message history, durability, and reliability are specified.
You can find the metadata in the metadata.yaml file:
rosbag2_bagfile_information: version: 5 storage_identifier: sqlite3 duration: nanoseconds: 179789623028 starting_time: nanoseconds_since_epoch: 1738854121844044371 message_count: 5887 topics_with_message_count: - topic_metadata: name: /image_topic type: sensor_msgs/msg/Image serialization_format: cdr offered_qos_profiles: "- history: 3\n depth: 0\n reliability: 1\n durability: 2\n deadline:\n sec: 9223372036\n nsec: 854775807\n lifespan:\n sec: 9223372036\n nsec: 854775807\n liveliness: 1\n liveliness_lease_duration:\n sec: 9223372036\n nsec: 854775807\n avoid_ros_namespace_conventions: false" message_count: 5887 compression_format: "" compression_mode: "" relative_file_paths: - rosbag2_2025_02_06-15_02_00_0.db3 files: - path: rosbag2_2025_02_06-15_02_00_0.db3 starting_time: nanoseconds_since_epoch: 1738854121844044371 duration: nanoseconds: 179789623028 message_count: 5887 - Message Count: 5,887 messages recorded for the
- Storage Format:
The database utilizes SQLite3 to store the messages. This backend was chosen for its ability to handle large amounts of data and facilitate easy querying.
-
File Storage:
The bag file is stored asrosbag2_2025_02_06-15_02_00_0.db3. This file contains both the video data (in thedatacolumn as BLOBs) and relevant metadata, including timestamps and topic names. -
Topics and Messages:
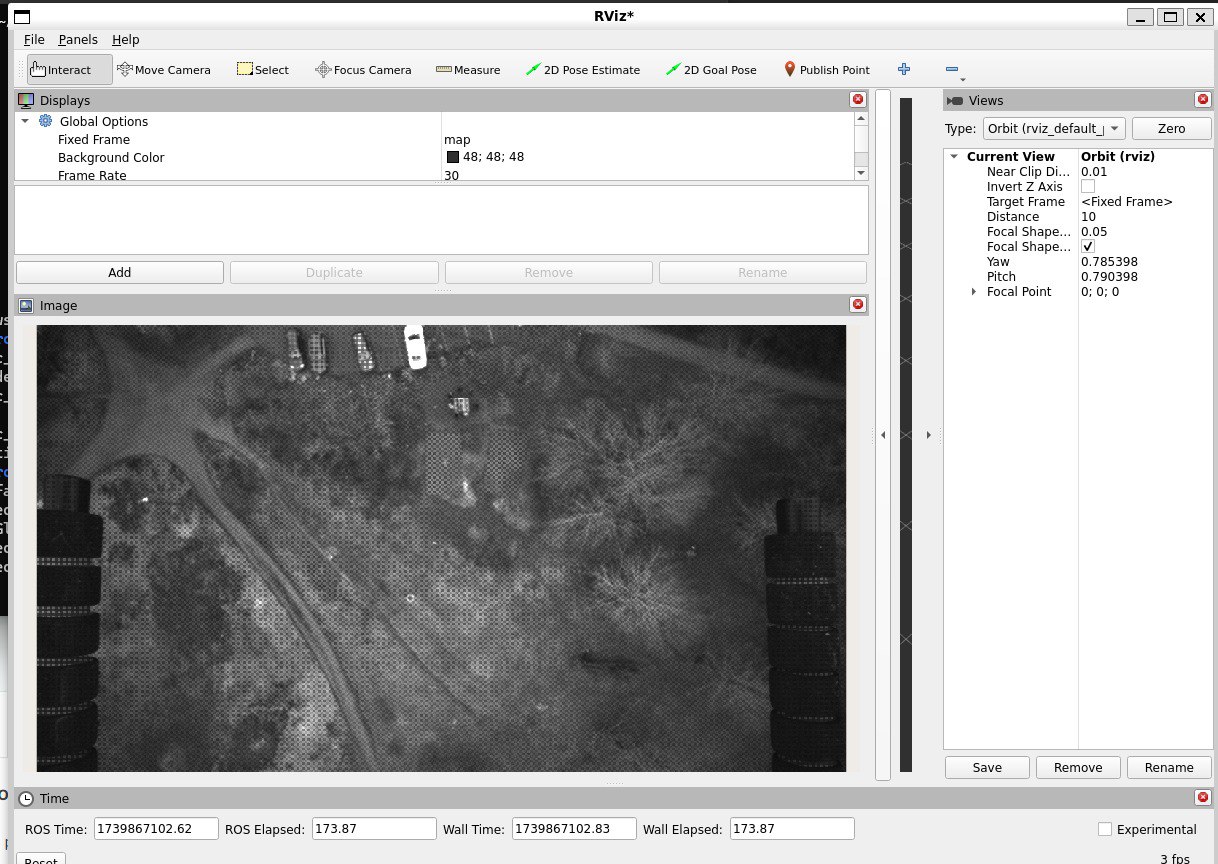
The /image_topic is the primary data stream in this recording. The recorded sensor_msgs/msg/Image messages represent images captured by a camera in the system, providing video footage of the recorded duration. -
Replay and Analysis:
The stored bag file can be used to replay the messages on another ROS2 system, allowing for debugging, sensor behavior analysis, and simulation without requiring real-time data.Command to replay the bag file:
ros2 bag play rosbag2_2025_02_06-15_02_00_0.db3
Corrupted Database and Repair Process
The database file rosbag2_2025_02_06-14_06_02_0.db3 was found to be corrupted during an import attempt. Initially, it was thought to be missing metadata, but further investigation revealed that the database itself was damaged.

To ensure that other members can also reproduce this process, the corrupted file, along with a pair of intact files and their metadata, have been securely transferred to a local machine via SCP. The files have not been modified in any way.
A solution was found on Stack Overflow involving a Bash script to repair the corrupted SQLite3 database. The script works as follows:
- It generates a SQL dump of the database, excluding any ROLLBACK statements.
- A
COMMIT;statement is appended to ensure all changes are finalized. - The cleaned SQL dump is then written to a new database file (
fix_$1).
Here’s the repair solution:
SQLite3 database or disk is full / the database disk image is malformed
Bash script to repair the corrupted database:
#!/bin/bash
# Provide the corrupted database file as the first argument
cat <( sqlite3 "$1" .dump | grep "^ROLLBACK" -v ) <( echo "COMMIT;" ) | sqlite3 "fix_$1"
Slowness in Repair Process
The repair process is taking an extended amount of time due to several factors:
- Large Database Size: The database is 67GB, which means the process of reading and filtering the data takes time.
- Rebuilding Process: After filtering the SQL dump, the insertion of data back into a new database is a time-consuming operation, especially for such a large file.
- Disk I/O: The speed of the repair depends heavily on the storage device. If using an SSD, the repair could take 2–6 hours, but on an HDD, it may take 10+ hours, potentially stretching over a day.
Command to run the repair script:
chmod +x repair_db.sh # Make the script executable
./repair_db.sh rosbag2_2025_02_06-14_06_02_0.db3 # Run the script with the corrupted database
Updates and Further Attempts
Based on the database’s state, the metadata file was updated:
nanoseconds_since_epoch: Timestamp of the last entry.duration: Time difference between the last and first entries.message_count: Total number of entries.
After modifying the metadata to reflect accurate timestamps and message counts, I securely transferred the repaired database to the remote machine via SCP, renaming the old file just in case. Then I attempted to play the bag video over a remote connection but encountered issues. The steps taken to troubleshoot included:
- Publishing a Simple String: Debugging by publishing a string message showed that my local machine (as a subscriber) was not listening to the published topic on the remote machine.
ros2 topic pub /test std_msgs/String "data: test" - Setting Up Remote ROS 2 Environment: I set up the remote ROS 2 environment as follows:
export ROS_DOMAIN_ID=42 export ROS_IP=<your_ip> # local and remote ip correspondingly export ROS_HOSTNAME=<your_local_ip> - Router Port Forwarding: I configured a port forwarding rule for port
11311on my router. - DDS Implementation Consistency: I set both machines to use the same DDS implementation:
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
Despite these efforts, I couldn’t play the video. Fortunately, we are a team. After collaborating with Kaius, we confirmed that the video located in ~/find-my-kitten/ros2_ws/src/vision_package/rosbag/rosbag2_2025_02_06-14_06_0 was repaired and could now be played: